




















1.Introduction sa AC drive (variable frequency drive) Sa lupain ng modernong pang -industriya na kontrol ng isang ......
Magbasa pa
Home / Balita / Balita sa industriya / Ipinaliwanag ng AC Servo Motor: Paano Ito Gumagana, Mga Uri, at Paano Pumili ng Tama
Ipinaliwanag ng AC Servo Motor: Paano Ito Gumagana, Mga Uri, at Paano Pumili ng Tama
Ano ang isang AC Servo Motor?
Ang AC servo motor ay isang uri ng electric motor na tumatakbo sa alternating current at idinisenyo upang magbigay ng tumpak na kontrol sa posisyon, bilis, at torque. Hindi tulad ng isang regular na AC motor na umiikot lamang sa isang nakapirming bilis, ang isang servo motor ay patuloy na nakakatanggap ng feedback mula sa isang encoder na nakakabit sa shaft nito. Ang feedback na iyon ay nagsasabi sa system nang eksakto kung nasaan ang motor sa anumang naibigay na sandali, na nagpapahintulot dito na gumawa ng real-time na mga pagwawasto at hawakan ang target na posisyon nito nang may mataas na katumpakan.
Ang salitang "servo" ay nagmula sa salitang Latin para sa alipin — at iyon talaga ang ginagawa nito. Ito ay tapat na sumusunod sa mga utos mula sa isang controller, patuloy na inaayos ang sarili nito upang tumugma sa anumang posisyon, bilis, o metalikang kuwintas na hinihiling. Ginagawa nitong ang AC servo motors ang backbone ng modernong automation, CNC machine, robotics, at anumang application kung saan mahalaga ang precision movement.
Ang naghihiwalay sa isang AC servo motor mula sa isang DC servo motor ay ang pinagmumulan ng kuryente at konstruksyon. Ang mga AC servo motor sa pangkalahatan ay mas matibay, nangangailangan ng mas kaunting maintenance (walang mga brush na papalitan), at mas angkop para sa high-speed, high-power na pang-industriyang kapaligiran. Halos palaging ginagamit ang mga ito kasama ng servo drive (tinatawag ding servo amplifier) at motion controller upang bumuo ng kumpletong closed-loop servo system.
Paano Gumagana ang isang AC Servo Motor
Ang pangunahing prinsipyo sa likod ng AC servo motor ay closed-loop feedback control. Narito ang isang direktang breakdown kung paano gumagana ang system mula simula hanggang matapos:
- Input ng command: Ang isang motion controller (PLC, CNC controller, o PC) ay nagpapadala ng target na value — gaya ng "rotate 90 degrees" o "spin at 3,000 RPM" — sa servo drive.
- Output ng servo drive: Ang servo drive ay nagko-convert ng command sa isang tiyak na kinokontrol na AC boltahe at kasalukuyang, na kung saan ay fed sa motor.
- paggalaw ng motor: Ang rotor ng motor ay gumagalaw bilang tugon sa electromagnetic field na nilikha ng stator windings.
- Feedback ng encoder: Ang isang rotary encoder na naka-mount sa motor shaft ay patuloy na sumusukat sa aktwal na posisyon at bilis, na nagpapadala ng data na ito pabalik sa servo drive.
- Pagwawasto ng error: Inihahambing ng drive ang aktwal na posisyon sa iniutos na posisyon at agad na inaayos ang output upang maalis ang anumang pagkakaiba (tinatawag na "error").
Ang loop na ito ay tumatakbo nang daan-daan o libu-libong beses bawat segundo, kaya naman ang mga servo system ay maaaring makamit ang gayong mahigpit na pagpapaubaya. Ang encoder ay isang kritikal na bahagi — karamihan sa mga modernong AC servo motor ay gumagamit ng mga high-resolution na encoder na may 17-bit o 23-bit na resolution, ibig sabihin ay makakakita sila ng milyun-milyong natatanging posisyon sa bawat rebolusyon.
Mga Uri ng AC Servo Motors
Mayroong dalawang pangunahing uri ng AC servo motors na ginagamit sa industriya ngayon, bawat isa ay may iba't ibang mga prinsipyo sa pagpapatakbo at mainam na mga kaso ng paggamit.
Kasabay na AC Servo Motor (PMSM)
Ang kasabay AC servo motor — kilala rin bilang Permanent Magnet Synchronous Motor (PMSM) — ay gumagamit ng mga permanenteng magnet na naka-embed sa rotor. Ang rotor ay umiikot sa eksaktong pag-synchronize sa umiikot na magnetic field sa stator. Dahil ang mga magnet ay palaging nakatutok, ang ganitong uri ng motor ay gumagawa ng mataas na torque kahit na sa mababang bilis at may mahusay na dynamic na tugon.
Ang mga synchronous servo motors ay ang pinakakaraniwang uri na ginagamit sa industriyal na automation at CNC na mga aplikasyon. Ang mga ito ay compact, mahusay, at may kakayahang mapanatili ang na-rate na torque sa malawak na hanay ng bilis. Ang mga tatak tulad ng Mitsubishi, Fanuc, Yaskawa, at Siemens ay nag-aalok ng magkasabay na servo motors bilang kanilang pangunahing linya ng produkto.
Induction AC Servo Motor (Asynchronous)
Ang induction servo motor ay gumagamit ng squirrel-cage rotor kung saan ang kasalukuyang ay na-induce ng umiikot na magnetic field — walang permanenteng magnet. Ang rotor ay palaging nahuhuli nang bahagya sa likod ng stator field (ito ay tinatawag na "slip"), na kung saan ay kung paano nabuo ang torque. Kapag ipinares sa isang vector-control servo drive, ang mga induction motor ay maaari ding makamit ang mahusay na bilis at kontrol ng torque, kahit na karaniwang hindi tumpak o tumutugon gaya ng mga magkakasabay na uri.
Ang mga induction servo motor ay kadalasang pinipili para sa mga high-power spindle application, tulad ng CNC milling machine spindles, kung saan ang napakataas na bilis at ruggedness ay mas mahalaga kaysa sa ultra-precise positioning. Mas mura rin ang mga ito sa mas malalaking rating ng kuryente.
Mga Pangunahing Detalye na Kailangan Mong Maunawaan
Bago pumili o magtrabaho sa anumang AC servo motor, kailangan mong maunawaan ang mga pangunahing spec sa datasheet. Narito ang isang simpleng pag-uuri ng mga pinakamahalagang parameter:
| Pagtutukoy | Ano ang Ibig Sabihin Nito | Bakit Ito Mahalaga |
| Na-rate na Torque (N·m) | Ang patuloy na metalikang kuwintas ay maaaring gawin ng motor sa rate na bilis | Dapat lumampas sa load torque kabilang ang friction at inertia |
| Pinakamataas na Torque (N·m) | Pinakamataas na torque para sa maiikling pagsabog (karaniwan ay 2–3× na na-rate) | Kailangan para sa acceleration at deceleration phase |
| Na-rate na Bilis (RPM) | Ang normal na bilis ng pagpapatakbo sa rated torque | Tinutukoy kung ang motor ay nababagay sa iyong profile ng paggalaw |
| Na-rate na Power (W o kW) | Output ng mekanikal na kapangyarihan (torque × bilis) | Ginagamit upang tumugma sa drive at laki ng mga cable/breaker |
| Resolution ng Encoder | Bilang ng mga pulso o bit bawat rebolusyon | Mas mataas na resolution = mas pinong kontrol sa posisyon |
| Rotor Inertia (kg·cm²) | Paglaban ng rotor sa mga pagbabago sa bilis ng pag-ikot | Dapat itugma sa load inertia para sa stable na kontrol |
| Rating ng IP | Antas ng proteksyon laban sa pagpasok ng alikabok at tubig | Kritikal para sa malupit o basang kapaligiran |
AC Servo Motor vs Stepper Motor: Alin ang Dapat Mong Gamitin?
Isa sa mga pinakakaraniwang tanong sa motion control ay kung gagamit ng AC servo motor o stepper motor. Parehong maaaring kontrolin ang posisyon, ngunit gumagana ang mga ito nang ibang-iba at angkop sa iba't ibang mga aplikasyon.
Ang isang stepper motor ay gumagalaw sa mga nakapirming increment (mga hakbang) at nagpapatakbo ng open-loop — ibig sabihin ay walang feedback ng encoder sa karamihan ng mga pangunahing setup. Ito ay simple, mura, at mahusay na gumagana para sa magaan na pagkarga sa katamtamang bilis. Gayunpaman, ang mga stepper ay maaaring makaligtaan ang mga hakbang sa ilalim ng mga kondisyon ng labis na karga nang walang anumang pagwawasto sa sarili, at nawawalan sila ng makabuluhang torque sa mas mataas na bilis.
Ang isang AC servo motor, sa kabaligtaran, ay laging alam kung nasaan ito salamat sa encoder. Hindi ito mawawalan ng posisyon sa ilalim ng pagkarga, mas mabilis na tumugon sa mga utos, at pinapanatili ang buong torque sa malawak na hanay ng bilis. Ang tradeoff ay gastos at kumplikado — ang isang servo system (motor drive cables tuning) ay nagkakahalaga ng higit pa kaysa sa isang stepper setup na may katumbas na laki.
Narito ang isang simpleng tuntunin ng hinlalaki: gumamit ng stepper para sa simple, low-load, low-speed positioning kung saan mahalaga ang gastos. Gumamit ng AC servo motor kapag kailangan mo ng mataas na bilis, mataas na torque, pagbabago ng dynamic na pagkarga, o kapag hindi napag-uusapan ang katumpakan ng posisyon.

Mga Karaniwang Aplikasyon ng AC Servo Motors
Lumilitaw ang mga AC servo motor sa halos lahat ng industriya kung saan kinakailangan ang kontroladong paggalaw. Ang ilan sa mga pinakakaraniwang application ay kinabibilangan ng:
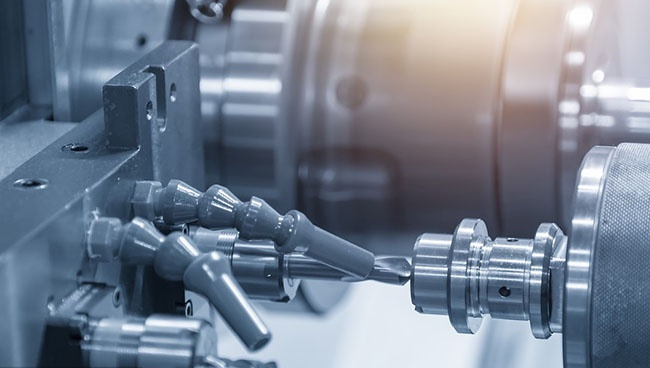
- Mga CNC Machining Center: Ang mga servo motor ay nagtutulak sa X, Y, at Z axes ng mga milling machine at lathes, pati na rin ang spindle sa ilang configuration. Pinapayagan nila ang makina na mag-cut ng mga kumplikadong hugis na may katumpakan sa antas ng micron.
- Mga Industrial Robot: Ang bawat joint ng isang 6-axis robot arm ay karaniwang pinapatakbo ng sarili nitong servo motor. Ang coordinated na kontrol ng lahat ng mga joints ay nagbibigay-daan sa tuluy-tuloy, tumpak na paggalaw sa mga kumplikadong mga landas.
- Mga Packaging Machine: Kinokontrol ng mga servo motor ang pag-index, pagputol, pagbubuklod, at pagpuno ng mga operasyon sa mga high-speed na linya ng packaging, kung saan mahalaga ang repeatability at bilis.
- Paggawa ng Semiconductor: Ang paghawak ng wafer, pick-and-place system, at inspeksyon na kagamitan ay umaasa sa servo motors para sa nanometer-level positioning repeatability.
- Pagpi-print at Pag-convert: Ang kontrol sa pagpaparehistro sa mga printing press at kontrol sa tensyon sa mga web-handling system ay nakasalalay sa mga servo motor upang mapanatili ang pare-parehong materyal na feed.
- Kagamitang Medikal: Ang mga CT scanner, surgical robot, at infusion pump ay gumagamit ng maliliit, tumpak na servo motors upang matiyak ang ligtas, tumpak na operasyon.
Paano Pumili ng Tamang AC Servo Motor
Ang pagpili ng tamang AC servo motor ay bumababa sa maingat na pagtutugma ng mga kakayahan ng motor sa mga hinihingi ng iyong aplikasyon. Ang pagmamadali sa hakbang na ito ay humahantong sa alinman sa isang underpowered system na nabigo sa field o isang napakalaking, overpriced na solusyon. Sundin ang mga hakbang na ito:
Hakbang 1 — Tukuyin ang Iyong Mga Kinakailangan sa Pag-load
Magsimula sa pamamagitan ng pagkalkula ng load torque, na kinabibilangan ng puwersa o bigat na ginagalaw, friction, at anumang mekanikal na transmission (gearbox, belt, ballscrew). Kalkulahin din ang load inertia — ito ay nagsasabi sa iyo kung gaano karaming enerhiya ang dapat ibigay ng motor upang mapabilis ang pagkarga. Ang isang pangkalahatang patnubay sa industriya ay ang panatilihing mababa sa 10:1 ang load-to-motor inertia ratio para sa mahusay na control stability, at pinakamainam na 3:1 o mas mababa para sa mga high-dynamic na application.
Hakbang 2 — Tukuyin ang Iyong Profile ng Paggalaw
Mag-sketch ng speed vs. time graph para sa iyong ikot ng paggalaw. Tandaan ang pinakamataas na bilis na kinakailangan, ang mga oras ng acceleration at deceleration, at ang duty cycle (kung gaano katagal ang motor na patuloy na tumatakbo kumpara sa mga rest). Tinutukoy nito ang parehong peak torque na kailangan (sa panahon ng acceleration) at ang RMS (root mean square) torque, na dapat manatili sa ibaba ng rate ng tuloy-tuloy na torque ng motor upang maiwasan ang overheating.
Hakbang 3 — Piliin ang Motor Frame at Power Rating
Kapag alam mo na ang iyong mga kinakailangan sa torque at bilis, pumili ng motor na may na-rate na torque at naka-rate na bilis na kumportableng sumasaklaw sa iyong mga pangangailangan nang may ilang margin (karaniwang 20–30%). Kumpirmahin din ang pisikal na laki ng frame na akma sa iyong mounting space — ang mga servo motor ay karaniwang available sa mga laki ng flange mula 40mm hanggang 200mm o mas malaki.
Hakbang 4 — Itugma ang Servo Drive
Ang servo drive ay dapat na tumugma sa boltahe, kasalukuyang, at uri ng encoder ng motor. Karamihan sa mga manufacturer ay nagbebenta ng mga katugmang set ng motor-drive (hal., Yaskawa Sigma series, Mitsubishi MR-J series, Siemens S-1FK series) na nagpapasimple sa pag-setup. Kung naghahalo ng mga brand, maingat na i-verify ang compatibility sa rating ng boltahe, encoder protocol (incremental, absolute, EnDat, BiSS-C, atbp.), at control interface (pulse/direction, analog ±10V, EtherCAT, PROFINET, atbp.).
Hakbang 5 — Isaalang-alang ang Mga Kondisyon sa Kapaligiran
Suriin ang operating environment. Kung ang motor ay malantad sa coolant, alikabok, o mga washdown, kailangan mo ng isang motor na may markang IP65 o IP67. Kung ito ay gagana sa matinding temperatura, i-verify ang ambient temperature range ng motor. Para sa pagkain at inumin o mga pharmaceutical application, maaaring kailanganin ang mga stainless steel shaft seal at mga espesyal na coatings.
Mga Pangunahing Kaalaman sa Pag-wire at Pag-install
Ang wastong pag-install ng AC servo motor ay kasinghalaga ng pagpili ng tama. Ilang mahahalagang punto na dapat tandaan:
- Paghiwalayin ang mga kable ng kuryente at signal: Palaging iruta ang motor power cable (U, V, W phase) nang hiwalay sa encoder feedback cable. Ang pagpapatakbo ng mga ito sa parehong conduit ay maaaring magdulot ng interference na nakakapagpapahina sa control loop.
- Gumamit ng mga shielded cable: Parehong dapat na protektado ang power cable at encoder cable, na ang shield ay naka-ground sa isang dulo (karaniwang dulo ng drive) upang maiwasan ang pag-pick up ng ingay.
- I-ground ang katawan ng motor: Ang motor housing ay dapat na konektado sa machine frame ground upang maiwasan ang electrical shock at mabawasan ang EMI emissions.
- Suriin ang pagkakasunud-sunod ng phase: Ang mga koneksyong U, V, W ay dapat tumugma sa pagitan ng motor at drive. Kung tumatakbo ang motor sa maling direksyon, palitan ang alinmang dalawang phase na wire — huwag kailanman magpalit ng mga wire ng encoder upang ayusin ang direksyon.
- Gumamit ng dynamic na risistor ng preno: Para sa mga motor na nagmamaneho ng mga vertical load o nangangailangan ng mabilis na paghinto, ang isang panlabas na resistor ng braking na konektado sa drive ay sumisipsip ng regenerative energy sa panahon ng deceleration at pinipigilan ang mga overvoltage fault.
Servo Drive Tuning: Pagkuha ng Pinakamahusay na Pagganap
Pagkatapos mag-wire, kailangang i-tune ang servo drive para tumugon nang tama ang control loop para sa iyong partikular na kumbinasyon ng motor-load. Karamihan sa mga modernong servo drive ay may kasamang auto-tuning function na nagpapaikot sa motor sa pamamagitan ng isang test routine at awtomatikong kinakalkula ang pinakamainam na mga setting ng gain. Ito ay karaniwang sapat na mabuti para sa mga karaniwang application.
Para sa mga demanding application — gaya ng high-speed pick-and-place o precision grinding — maaaring kailanganin ang manual na pag-tune ng tatlong pangunahing PID gains (position gain, velocity gain, at integral gain). Ang pagtaas ng mga nadagdag ay ginagawang mas mabilis at mas matigas ang pagtugon ng system, ngunit masyadong mataas at nagiging hindi matatag at umuusad ang system. Ang layunin ay upang makamit ang mabilis na pagtugon nang walang overshoot o pangangaso.
Pinahihintulutan ka rin ng karamihan sa mga drive na magtakda ng mga filter ng notch upang sugpuin ang mga frequency ng mekanikal na resonance, mga nadagdag sa feedforward upang mapabuti ang katumpakan ng pagsubaybay sa panahon ng acceleration, at kompensasyon ng friction upang mabawasan ang error sa posisyon sa mababang bilis. Ang paglalaan ng oras upang ibagay nang maayos ang mga setting na ito ay maaaring gumawa ng malaking pagkakaiba sa panghuling katumpakan ng pagpoposisyon at throughput ng makina.
Mga Tip sa Pagpapanatili at Pag-troubleshoot
Ang mga AC servo motor sa pangkalahatan ay lubos na maaasahan dahil wala silang mga brush o commutator na mapuputol. Gayunpaman, kailangan pa rin ng ilang maintenance sa paglipas ng panahon:
- Pagpapalit ng tindig: Ang mga motor bearings ay ang pinaka-karaniwang gamit na gamit. Tinukoy ng karamihan ng mga tagagawa ang mga pagitan ng pagpapalit ng bearing batay sa mga oras ng pagpapatakbo — karaniwang bawat 20,000 hanggang 30,000 na oras. Ang sobrang panginginig ng boses o ingay ay isang maagang senyales ng pagkasuot ng bearing.
- Inspeksyon ng cable ng encoder: Ang mga encoder cable ay madalas na nakabaluktot nang paulit-ulit (lalo na sa mga robot arm o gantry system) at maaaring magkaroon ng mga panloob na break sa paglipas ng panahon. Kung ang isang servo ay nagsimulang magpakita ng mali-mali na mga error sa posisyon o mga pagkakamali, paghinalaan muna ang encoder cable.
- Mga pagsusuri sa sobrang init: Kung uminit ang motor, i-verify na nasa spec ang duty cycle, na ang temperatura sa paligid ay katanggap-tanggap, at ang ibabaw ng motor ay malinis at hindi nakaharang. Ang matagal na overheating ay nagpapababa sa winding insulation at nagpapaikli sa buhay ng motor.
- Mga code ng alarma sa pagmamaneho: Kapag nagkaroon ng fault, palaging basahin ang alarm code mula sa servo drive display o software. Kasama sa mga karaniwang code ang overvoltage, overcurrent, error sa encoder, sobrang karga, at labis na paglihis ng posisyon. Ang bawat isa ay direktang nagtuturo sa iyo sa ugat na dahilan.
Ang pagpapanatiling tala ng pagpapanatili ng mga oras ng pagtakbo ng motor, kasaysayan ng alarma, at anumang pisikal na inspeksyon ay napupunta sa isang mahabang paraan sa paghula ng mga pagkabigo bago sila magdulot ng hindi planadong downtime.
Nakaraang post
Walang nakaraang artikulo
Susunod na post
Ipinaliwanag ang Medium-Voltage Variable Frequency Drive: Paano Ito Gumagana, Aling Topology ang Pipiliin, at Ano ang Tutukoy
Copyright 2024 Fujian Raynen Technology Co, Ltd. Nakalaan ang lahat ng mga karapatan.
Patakaran sa Pagkapribado 